Bestimmung von Eigenwerten und Eigenvektoren
- Schwingungen eines Fachwerks:
- Fachwerk
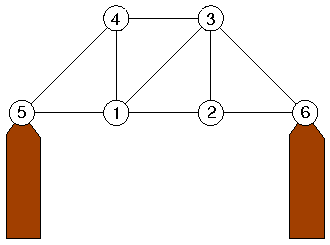
- in den Punkten 5 und 6 fest gelagert
- alle Knoten haben Masse m
- Balken als Zug-/Druckfedern mit gleicher
Federkonstante c
- äußere Vibrationen wirken auf das Fachwerk (durch
die Lager 5, 6)
- bei einigen Frequenzen heftiges Mitschwingen
(Eigenfrequenzen)
- jeweils typische Schwingungsformen
(Eigenschwingungen)
- Definition der Eigenwertaufgabe:
- gegeben sei eine nxn-Matrix A
- gesucht sind Zahl λ und Vektor x ≠ 0 mit
- λ heißt Eigenwert
von A, x Eigenvektor von A zum Eigenwert
λ
- Länge von x beliebig, häufig auf 1 gesetzt (oder
größte Komponente auf 1)
- Beispiel 1 (Diagonalmatrix)
- Beispiel 2 (symmetrische Matrix)
- Beispiel 3 (unsymmetrische Matrix)
- Beispiel 4 (nur 1 Eigenvektor)
- kein weiterer Eigenwert und Eigenvektor (bis
auf Faktor)
- Eigenschaften von Matrizen:
- besondere Matrizen
- AT = A (symmetrisch)
- AT A = 1 (orthogonal, z.B. Drehungen
und Spiegelungen)
- (x, Ax) ≥ 0 für bel. Vektor x (positiv)
-
Ähnlichkeitstransformation
- B = U A U-1 (U beliebig, aber
invertierbar)
- Satz:
- Ähnliche Matrizen A und B haben gleiche
Eigenwerte
- x Eigenvektor von A ⇒ Ux Eigenvektor von
B
- Beweis
- Satz:
- Sei A symmetrisch. Dann ist A zu einer reellen
Diagonalmatrix D ähnlich, wobei die Transformationsmatrix U
orthogonal ist:
- A = U D UT mit UT U =
1
- Insbesondere sind alle Eigenwerte reell, der
k-te Eigenvektor ist die k-te Spalte von U.
- Beweis: z.B. in [8]
- etwa bei Beispiel 2
- betrachten i.F. nur symmetrische Matrizen
- Analytische Berechnung von Eigenwerten und -vektoren:
- A nxn-Matrix, dann gilt für ein x ≠ 0
- also Polynom der Ordnung n für λ
(charakteristisches Polynom von A)
- hat n Lösungen (davon können mehrere
zusammenfallen)
- für Beispiel 2
- Eigenvektor x1 als Lösung des homogenen
System
- 1. Komponente willkührlich auf 1 setzen
→
- Vektor normieren (Länge 1) durch Multiplikation
mit 0.3827 →
- analog für x2
- Verfahren für größeres n wenig brauchbar
- keine Lösungsformeln für n > 4
- Nullstellensuche von Polynomen i.a. schlecht
konditioniert
- QR-Verfahren:
- Grundidee:
- Transformiere A mit geschickt gewähltem
orthogonalen U
- A' = UT A U
- so dass A' größere Diagonal- und kleinere
Nichtdiagonalelemente hat als A
- Wiederhole, bis A' nahezu diagonal
- Prinzip des QR-Verfahrens
- Mache QR-Zerlegung von A
- A0 = Q R
- neues A ist A1 = R Q
- dies ist eine Ähnlichkeitstransformation,
denn
- im Beispiel
- nach 10 Iterationen wird aus B

- U (und somit die Eigenvektoren) erhält man
aus

- nach 10 Iterationen
- Konvergenz-Beschleunigung durch Shift
- verschiebe Eigenwerte vor der QR-Zerlegung um
σk

- schiebe hinterher wieder zurück

- sinnvoller Wert für σk: rechte
untere Ecke von Ak

- im Beispiel

- schon nach 3 Iterationen erhält man die
Ergebnismatrizen auf 4 signifikante Stellen
- Symmetrische Hessenberg-Form:
- QR-Verfahren konvergiert erheblich schneller für
Tridiagonalmatrizen (symmetrische Hessenberg-Matrizen)
- kann durch Transformation mit n-2
Householdermatrizen (s. QR-Zerlegung) aus beliebiger symmetrischer
Matrix erreicht werden
- 1. Schritt mit folgendem Vektor v
- folgende Schritte mit Teilmatrizen
- Beispiel
- 1. Schritt
- 2. Schritt
- zusammen
- Verallgemeinertes Eigenwert-Problem (VEP):
- gegeben seien zwei nxn-Matrix A, B
- gesucht sind Zahl λ und Vektor x ≠ 0 mit
- wichtiger Spezialfall: A, B symmetrisch, B positiv
und nicht singulär
- dann auf normales Eigenwert-Problem zurückführbar
- Cholesky-Zerlegung von B
- B = L LT
- dann gilt
- also:
- Eigenwert λ und Eigenvektor x von
L-1 A (L-1)T bestimmen
- λ ist Eigenwert des VEP
- (L-1)T x ist Eigenvektor
des VEP
- Matlab-Funktionen:
- Lösung des Eigenwertproblems
- [U,D] = eig(A)
- A = U D UT, UT U = 1, D
diagonal
- Eigenwerte = Werte aus diag(D)
- Eigenvektoren = Spalten von U
- Lösung des verallgemeinerten Eigenwertproblems
- [U,D] = eig(A,B)
- Bedeutung wie bei eig
- Hessenberg-Matrix zu A
- [Q,H] = hess(A)
- A = Q H QT mit QT Q =
1
- Anwendung auf Schwingungsprobleme:
- Bewegungsgleichung für kleine Schwingungen (frei und
ungedämpft)

- x(t): Vektor der Koordinaten, Auslenkungen aus
der Gleichgewichtslage
- M: symmetrische, positive Matrix (Massenmatrix)
- C: symmetrische, positive Matrix (Steifigkeitsmatrix)
- Ansatz
- liefert
- also verallgemeinertes Eigenwert-Problem mit
- Eigenwert ω2
- Eigenvektor

- Lösung liefert Schwingung mit Eigenfrequenz ω
= 2 π f
- Aufgaben: