Bestimmung der Differentialgleichung
- Erzwungene Schwingungen:
- Anregung eines schwingfähiges System durch äußere Kräfte
- Ursachen z.B.
- direkte Kraftübertragung
- Fußpunkterregung
- Unwucht
- Anregung häufig harmonische Schwingung
- FE(t) =
 E cos(Ω t)
E cos(Ω t)
- Aufstellen der Bewegungsgleichung:
- Schwinger mit viskoser Dämpfung
- beliebige äußere Kraft FE
- m
 + b
+ b  + c x = FE
+ c x = FE
- mit den Abkürzungen
- ist dies
- + 2 D ω0 + ω02
x = ω02 fE
- Erregerfunktion fE:
- gleiche Einheit wie x
- im statischen Fall fE(t) ≡ xS
= const:
- x = xS (statische Verschiebung)
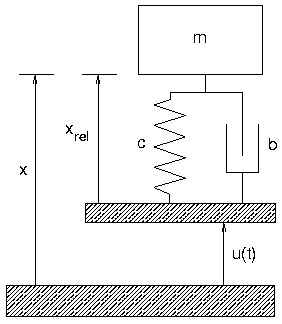
- Schwinger mit Fußpunkterregung:
- System schwingt, weil sich der Boden bewegt
- Bewegung des Bodens: u(t)
- Abstand des Schwingers vom Boden
- Dämpfung und Feder bezogen auf xrel, daher
- + 2 D ω0 ( -
 ) + ω02
(x - u) = 0
) + ω02
(x - u) = 0
- Bewegungsgleichung für xrel
- rel + 2 D ω0
rel + ω02
xrel = -
 ≡
ω02 fE
≡
ω02 fE
- speziell für harmonische Anregung
- zusätzlicher Faktor Ω2
- Bewegungsgleichung für x
- + 2 D ω0 + ω02 x = 2
D ω0 + ω02
u ≡ ω02 fE
- für harmonische Anregung
- mit
- komplizierter Faktor und zusätzliche Phasenverschiebung
ψ
- Vergleich der Bezugssysteme
- Absolutsystem x
- Inertialsystem
- Kräfte leicht berechenbar
- besser verallgemeinerbar auf gekoppelte Systeme
- Relativsystem xrel
- xrel leichter messbar
- Abstand zum Boden wichtige Größe
- keine zusätzliche Phasenverschiebung
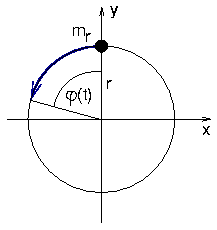
- Schwinger mit rotierender Unwucht:
- Modell:
- Masse mr (Unwucht) rotiert im Abstand r
von Drehachse
- beliebige Drehbewegung φ(t)
- Anregung des Schwingers (Gesamtmasse m) nur in vertikaler
Richtung
- Rotorbewegung qr:
- Vertikale Kraft durch Rotor auf Maschine = Gegenkraft
zur Beschleunigung des Rotors
- speziell bei konstanter Drehgeschwindigkeit
- ebenfalls zusätzlicher Faktor Ω2
- Aufgaben: