Lösung von Aufgabe 20
- Alle Berechnungen können mit dem
Matlab-Skript ex20.m ausgeführt
werden.
- ohne Tilger:
- Im Fall ohne Tilger vereinfacht sich die Bewegungsgleichung
zu
- Die entsprechende Systemfunktion incl. aller Parameter
ist schnell hingeschrieben:
- function dydt = f1d(t, y, m, b,
c, F, Om)
% rechte Seite der DGL bei erzwungener Schwingung ohne Tilger
x = y(1);
v = y(2);
dydt = [v; (F*cos(Om*t) - b*v - c*x)/m];
- Für den Solver muss eine Hilfsfunktion eingeführt
werden, die nur von t und y abhängt:
- f1 = @(t,y) f1d(t,y,m1,b1,c1, F1,
Om);
- Dann kann mit dem Standardsolver ode45
das Problem sofort gelöst werden:
- [t, y] = ode45(f1, [0 60], [0 0]);
x = y(:,1); % Auslenkung
v = y(:,2); % Geschwindigkeit
plot(t, x);
xlabel("t [s]","FontSize",12);
ylabel("x [m]","FontSize",12);
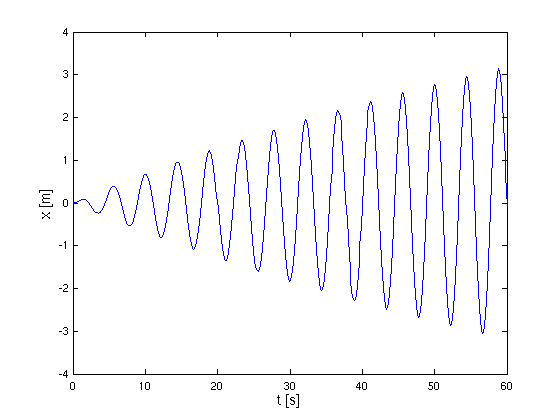
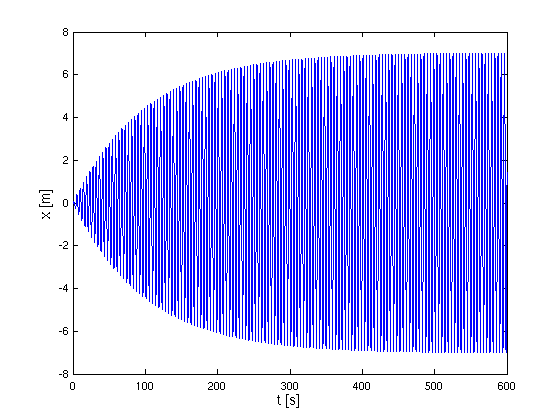
- Der Plot zeigt, dass sich die Schwingung der Masse noch
aufschaukelt, man muss für die Dauerschwingung also länger simulieren.
Für t1 = 600 s erhält man
- Aus dem Bild kann man die erreichte Amplitude ungefähr
ablesen. Genauer geht es, indem man die Daten aus der Simulation direkt
verwendet. Dazu werden zunächst die Werte nach t = 500 s herausgefiltert,
dann unter diesen das Maximum herausgesucht:
- index = find(t >= 500);
xSpaet = x(index);
amplitude1d = max(abs(xSpaet))
- Man erhält eine Amplitude von 7.0085 m. Bei genauerer
Betrachtung stellt man übrigens fest, dass die Amplitude immer noch
- wenn auch nur leicht - ansteigt!
- mit Tilger:
- Im Fall mit Tilger hat man zwei Gleichungen jeweils zweiter
Ordnung, man braucht also einen Vektor mit insgesamt 4 Zustandsgrößen.
Am einfachsten definiert man
- Schreibt man die Matrix-Vektor-Multiplikationen komponentenweise
aus, kann man die Systemfunktion leicht hinschreiben:
- Eleganter und - spätestens bei größeren
Systemen - übersichtlicher wird es, wenn man y in Zweiervektoren
zerlegt und die Matrizen stehen lässt:
- In Matlab lautet die entsprechende Funktion dann einfach
- function dydt = f2d(t, y, M, B,
C, Fhat, Om)
% rechte Seite der DGL bei erzwungener Schwingung mit Tilger
x = y(1:2);
v = y(3:4);
dx = v;
dv = inv(M)*(Fhat*cos(Om*t) - B*v - C*x);
dydt = [dx; dv];
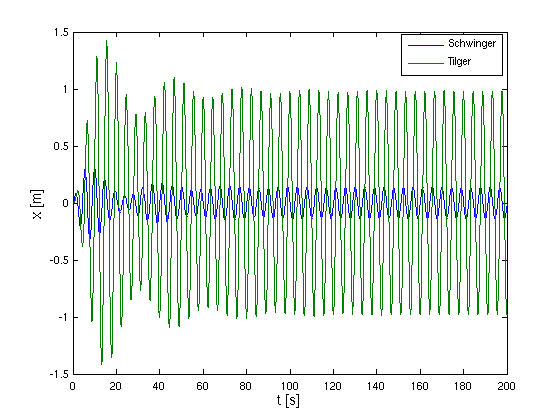
- Das kann wieder leicht mit ode45
integriert werden, man erhält
- Spätestens ab t = 100 s ist die Dauerschwingung erreicht.
Wie oben erhält man eine Amplitude von 0.1413 m für den Schwinger
und von 0.9942 m für den Tilger. Das Maximum über alle
Tilgerauslenkungen zeigt, dass er in der Einschwingphase bis auf 1.4287
m ausgelenkt wird.